Apple growing systems are evolving
As first seen in the Orchardist, April 2018
Jack Hughes, Fruition Horticulture, Hawkes Bay
The IFTA (International Fruit Tree Association) has recently completed a successful NZ Conference and Tour. A theme of the tour was the evolution of growing systems in a world where labour is becoming increasingly scarce and expensive. In this article, some of the considerations around orchard design, efficiency and suitability for mechanization are discussed.
Different tree canopy forms have been under development and testing for a long time. JM Lespinasse assessed some of the contenders in his booklet, Apple Tree Management, published in 1980 (Figure 1). Even though this was published nearly 40 years ago, it’s a useful way to set the scene. Lets discuss the pictures:
Figure 1. Tree Forms, Lespinasse, 1980
 The vertical axe and its variants of Tall Spindle and Slender Spindle have become the predominant growing systems around the world. They are becoming known as ‘3D’ referring to their dimensions of length, width and depth. It’s the depth that can be a problem with both production efficiency and suitability for mechanization. The term ‘3D’ almost implies criticism of these issues. Studies1 have shown that light levels can even be sub-optimal in the interior of small dwarf canopies resulting in adverse effects on fruit size and quality. These effects kick in as canopy depth increases as does easy access into the canopy for staff working on mobile platforms or for robotic harvesters.
The vertical axe and its variants of Tall Spindle and Slender Spindle have become the predominant growing systems around the world. They are becoming known as ‘3D’ referring to their dimensions of length, width and depth. It’s the depth that can be a problem with both production efficiency and suitability for mechanization. The term ‘3D’ almost implies criticism of these issues. Studies1 have shown that light levels can even be sub-optimal in the interior of small dwarf canopies resulting in adverse effects on fruit size and quality. These effects kick in as canopy depth increases as does easy access into the canopy for staff working on mobile platforms or for robotic harvesters.
The large format Palmette has been superceded, but smaller scale, 2 and 3 leader trees are currently in vogue. If these canopies are sufficiently thin or planar, they achieve 2D status. This means they could be suitable for mechanization.
The ‘buisson’ (bush) is an upright multileader and is truly an ‘old school’ canopy form. Multileaders could be called 4D if time is included as a factor! Related ‘old school’ thinking is that larger canopies produce more. The reality is that the crop migrates up and out to canopy edges as tree size increases.
The Drapeau Re-equilibre (literally translated as ‘re-balanced flag’) bears an uncanny resemblance to today’s FOPS. It even features a slight upward angle of the main stem to favour uniformity of the upright fruiting branches.
V’s and fruiting walls
New to L’Espinasse’s list are the V shaped canopies. The big plus to this design is that twin angled canopies intercept more light than vertical ones. The Washington V is probably the most extensively adopted commercial version (Picture 1.)
Picture 1. Tom Auvil discussing the finer points of a V test block on an IFTA tour stop at T&G in Hastings

The French developed the concept of the fruiting wall over 20 years ago. While early versions weren’t successful, interest grew as platforms and mechanical hedgers were subsequently developed. More recently researchers Masseron and Roche at CTIFL began mechanically shearing trees on dwarf rootstocks in the early summer. They found that narrowing and topping canopies at this time didn’t significantly reduce yield or stimulate much regrowth. These refinements encouraged wider interest in Europe and the US. Growers are now retro-fitting 3D, tall spindle canopies into fruiting walls by mechanically hedging them into a narrower profile. The Cornell Extension service in upstate New York is running a comprehensive research programme investigating transitioning Tall Spindle 3Ds to 2D Fruiting Walls.
There is a somewhat blurry line between definitions of slender spindles and fruiting walls. One practical definition of a fruiting wall is being able to ‘reach the trunk with your hand’. This means it is a thin canopy and potentially suitable for platforms and eventually robots. We’ll use this definition in this article ie a fruiting wall means a thin vertical canopy with a maximum total basal width of (2x45cm=) 90cm.
The timing of crop regulation influences system performance
So, there are many canopy design options and further combinations of variety, rootstock and tree management options. Digesting the many claims around yield performance for the different systems gets interesting.
An important factor influencing the yield performance of any system is the timing and efficiency of crop regulation. A 2017 trial at Lamont Farms, NY2 illustrates this point well – Standard crop management was compared with early crop load regulation in an intensive planting of Royal Gala. In the standard treatment, four applications of chemical thinner were applied between petal fall and 22mm fruit diameter with follow-up hand thinning at the normal time. For the early adjustment treatments, flowers were hand thinned at the balloon stage to either 1 or 2 flowers per cluster (king + side bloom) and crop loads were fine tuned at 8mm fruitlet diameter. Fruit numbers were similar between treatments but the manually bloom thinned fruit was on average 46g larger (217 vv 171g). Fruit also tended to be larger when carried in singles rather than doubles.
The early crop load adjustment resulted in the trees efficiently directing all their resources to crop over the entire growing season. The larger fruit size of the bloom thinned block increased its bottom line profitability by almost FOUR times over the standard because of the US market premium for large sizes!
Labour availability and the ease of covering the whole canopy are a key constraints to adopting manual bloom thinning. Clearly any comparison of orchard systems needs to be made on a ‘like for like’ basis regarding crop load management. For example, some Washington V trellis growers manually flower thin and the FOPs system integrates bud extinction and early thinning into its management practice.
Robot ready
The term ‘robot ready’ was a key concept throughout the IFTA conference. The idea being that apple harvesting robots are coming but they will only work efficiently in suitably, slim canopies where there is nothing between ‘end effector’ (fruit sucker) and the fruit. Any presence of wires or wood will result in fruit damage as the fruit is sucked off past the obstruction. A leading robot manufacturer (Abundant Robotics) intend to offer their technology as a harvest contracting service. For example, the grower would give a colour line-up and the robots would colour pick to that specification for an agreed price per bin. The robot would leave behind fruit that was not ready or inaccessible for tidying up by hand.
The consensus appears to be that the robots are coming but there are challenges on both sides of the equation– getting canopies ready for the robots and robots slimmed down for ideal row widths.
Proto-type robots are currently wide and heavy. They require an accessible row width of approximately 9 feet (2.74m) and weigh in near 8 tonnes. This suggests that soft ground, slopes and row access could be issues unless commercial models can be scaled down. The proportion of land area lost to non-productive row alley increases with increasing row width. If a robot needed 2.74m of clear access, that plus canopy depth (say, 2×45=90cm without any safety margin) totals 3.64m. Canopy volume per hectare would be reduced by 18% (8,200 from 9,900 m-3) for a 3.64m row compared with a 3m row given equal tree heights of 3.9m.
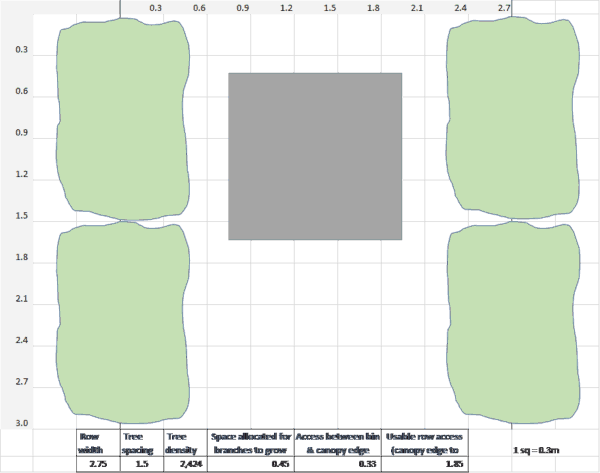
A row width of 2.75m could suit a narrow fruiting wall or 2D system with a total canopy width of 0.9m. These dimensions allow a 0.3m access gap either side of a 1.2m wide bin or machinery (Figure 2).
Figure 2. Example orchard layout for a slim canopy system
Enter the platform
Self-steering mobile platforms are slowly gaining popularity in a number of countries. Platforms require orchards of sufficient scale and uniformity to be cost effective but offer a number of ease and cost efficiencies for pruning, training, thinning and hand harvesting of the above ground portion of ‘platform ready’ canopies. Many growers are evaluating their contribution while robots are being developed.
Canopy design and management
Back to canopy design – Should the crop be carried on vertical fruiting wood (FOPS), angled (V), horizontal (2D) or does it not matter (fruiting wall)? The more formal or structured a system, the bigger the investment to position (tie down) branches. These systems also require more informed decision making. Are branches permanent or temporary fruiters (‘cheaters’) and should less than ideal branches be kept and tied down or removed?
At the more informal end of the spectrum, fruiting wall systems can avoid a lot of the tree training expense. There is scope for a flexible, combination approach of manual and mechanical pruning and branch training as required.
Structural Investment
Further system differences arise in the costs of the structural support. The cost for ‘fruiting walls’ is the least because the structure is not load bearing and only needs to keep the main leader vertical. FOPs and 2D structures must support the canopy and weight of the crop. With V’s, the angled canopy increases the requirement for load strength even more.
Environmental modification
Protecting crops from sunburn and hail is becoming more important in many locations. Overhead netting is often becoming part of a system design.
Crystal ball stuff
The relative capital costs of trees and their support and the cost and availability of labour are clearly major influencers on tree density and system design. The North Americans may be more strongly incentivized by cheaper trees and scarcer labour than us and are consequently making the big innovations in growing systems.
The availability of even cheaper trees from tissue cultured trees from labs like Phytelligence (phytelligence.com) appears to be another ‘game-changer’. Unbranched bench grafted or micro-chip budded whips are now coming on stream in any variety and rootstock combination and at a significant discount to conventionally grown trees. These smaller trees are often favoured because they can be developed into any form. They typically establish and grow well in the important first years because they are in ‘vegetative mode’. Branching and precocity can also be modified by plant growth regulators.
So how might things evolve in New Zealand. Perhaps:
- The V trellis won’t increase in popularity much because experience may prove that there is little extra fruit value return for the extra costs of support structures and tree training. The inaccessibility of the inside of the V is also a negative that won’t go away.
- Adoption of FOPs appears likely to be held back by the row width conundrum. Should it be ‘narrower for productivity’ or ‘wider for equipment’? Changing to a narrower bins and orchard equipment to achieve the big yields may be a bridge too far for most. On the other hand, if wider row widths that allow conventional bins and orchard equipment mean productivity is constrained, then the appeal of FOPs is diminished.
- 2D does work but it is a rigid system requiring significant and ongoing tree training expense. 2D’s suitability to platforms and ultimately robots is a plus but such as highly structured system is not everyones’ cup of tea.
- Twin leader systems have many of the features of 2D plus considerable industry momentum. There is the challenge of getting custom-grown nursery grown trees or the check to canopy development if they have to be headed back in the orchard. The simplicity of maintaining twin leaders once they are established may well be a plus that supports their ongoing popularity.
- The fruiting wall offers considerable scope and potential even though it is hardly on the NZ radar for now. Its efficiency in terms of the labour and capital investment and suitability in a transition from ladders to platforms to robots are plus’s. Flexibility for manual and mechanical inputs and over a range of vigour, varieties, growth habits and management styles could also appeal to many. If growers get comfortable with these attributes, fruiting walls could well gain acceptance over time.
We’ll see.
Acknowledgements
- Dr Poliana Francescatto (pers comm) PostDoc Research Associate, of Horticulture, Cornell University.
- Terence Robinson et al. Modifying apple tree canopies for improved production efficiency. HortSc Vol26B August 1991.
Well written explanation.